






























Il progetto BUDD-e ha l’obiettivo di realizzare, progettare e personalizzare una nuova guida robotica autonoma, BUDD-e, per persone cieche e ipovedenti, utilizzando un sistema innovativo di interazione uomo-robot con lo scopo finale di rendere spazi pubblici e servizi pienamente accessibili, funzionali e fruibili da soggetti ciechi e ipovedenti.
Gli scenari applicativi saranno spazi pubblici dove l’utente potrà prenotare BUDD-e e avere la possibilità di muoversi autonomamente all’interno di ambienti, quali ospedali, centri sportivi, centri commerciali, parchi e centri culturali.
Al momento, la fase di validazione sperimentale è stata effettuata all’interno del Centro Sportivo Giuriati e l’ASST Grande Ospedale Metropolitano Niguarda, a Milano.
Il progetto si è avvalso del contributo fondamentale di volontari e di realtà associative e istituzionali di primo piano, tra cui la Fondazione Istituto dei Ciechi di Milano ONLUS (in qualità di scientific advisor), il Consiglio Regionale Lombardo dell’Unione Italiana dei Ciechi e degli Ipovedenti ONLUS-APS, l’ASST Grande Ospedale Metropolitano Niguarda, YAPE S.r.l., REAL EYES SPORT, il Gruppo Sportivo Dilettantistico GSD Non Vedenti Milano ONLUS e il Servizio Sport – Area Campus Life del Politecnico di Milano.
I problemi di disabilità visiva coinvolgono attualmente circa il 4% della popolazione mondiale e si stima che il numero sia destinato ad aumentare nei prossimi decenni.
Uno tra i problemi principali per le persone cieche e ipovedenti è la difficoltà ad orientarsi in ambienti non familiari.
Le infrastrutture inadeguate ad accogliere questa parte di popolazione creano barriere e disuguaglianze, a partire dell’accesso ad edifici, a servizi come i centri commerciali, centri sportivi, ospedali, alberghi e aeroporti e nell’utilizzo dei trasporti pubblici.
Spesso l’uso degli ausili più comuni, come bastoni bianchi e cani guida, può risultare problematico. Per le persone non vedenti e ipovedenti sarebbe pertanto fondamentale il supporto di guide e personale di supporto, dei quali però si ha ancora poca disponibilità.
Quanto citato costituisce una limitazione per persone con disabilità visiva e, in molti casi, è impossibile per alcune persone uscire senza accompagnatori.
Il recente sviluppo di tecnologie assistive può consentire alle persone con tale disabilità di svolgere attività quotidiane senza barriere e in autonomia.
E’ stata svolta un’analisi del contesto per evidenziare le funzionalità che la guida autonoma dovrebbe incorporare e le opportunità di miglioramento degli spazi in termini di inclusività e accessibilità con particolare attenzione alle esigenze delle persone non vedenti. Questo ha portato comprensione, consapevolezza e motivazione non solo sulle potenzialità del progetto, ma anche sui suoi obiettivi e limiti realistici.
In particolare, sono stati organizzati focus group e questionari per comprendere al meglio le esigenze degli utenti e delle strutture stesse. E’ disponibile il rapporto conclusivo “Questionari e Focus Group_Report“.
BUDD-e è composto da:
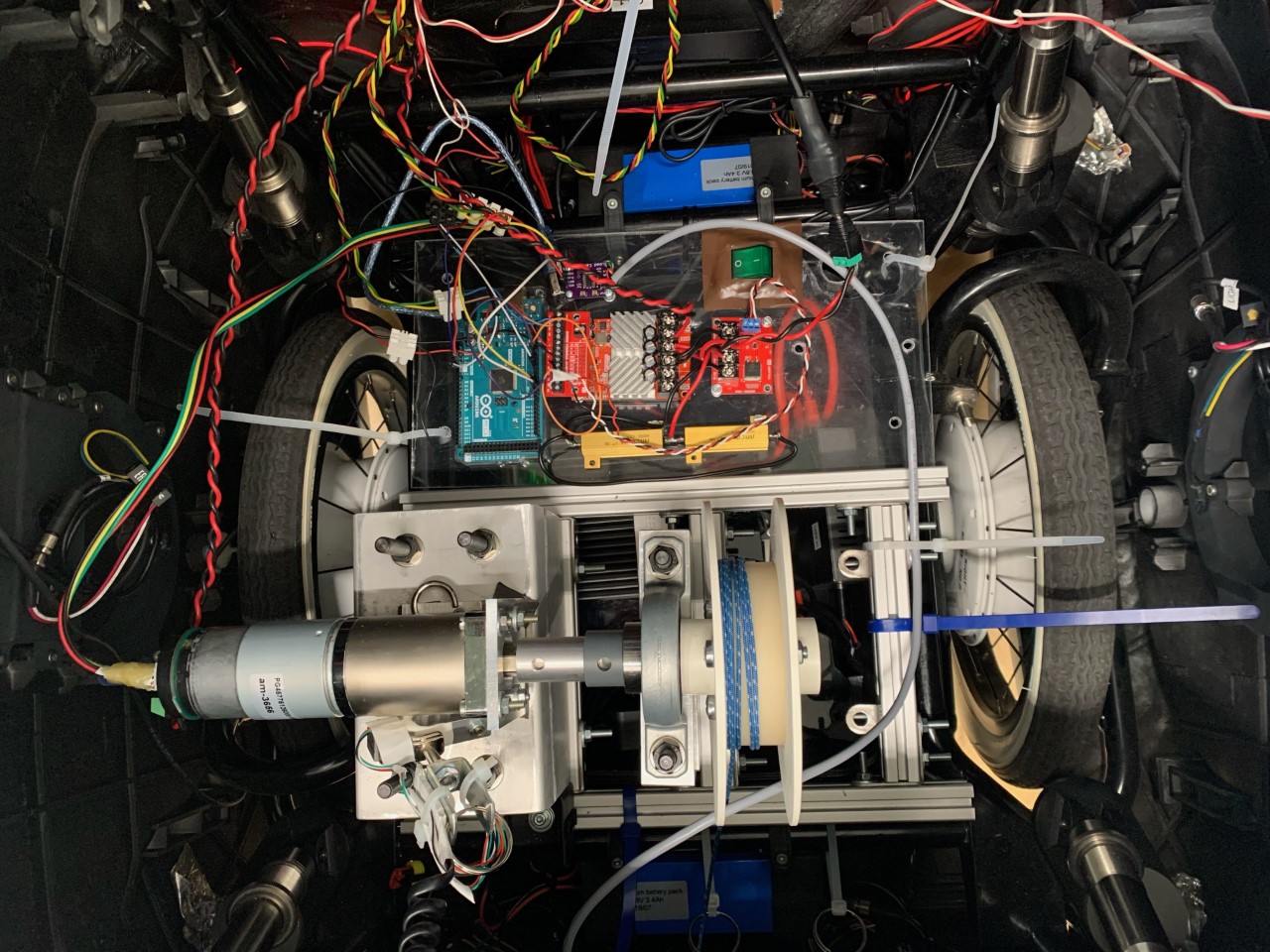
– Il veicolo autonomo YAPE, dotato di sensori LIDAR, telecamere e IMU per l’orientamento, il tracciamento della posizione, e l’interazione con un ambiente altamente dinamico e popolato.
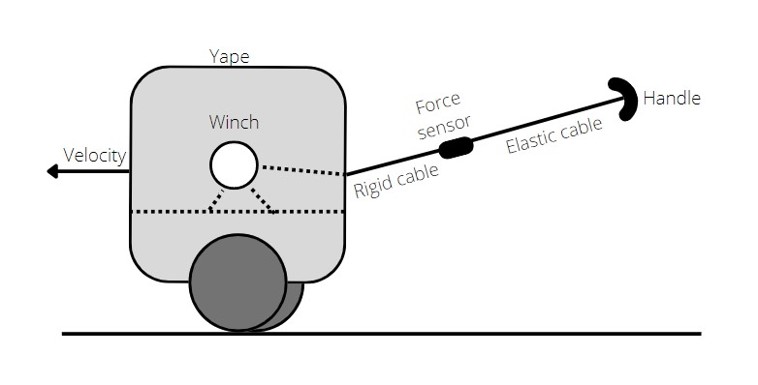
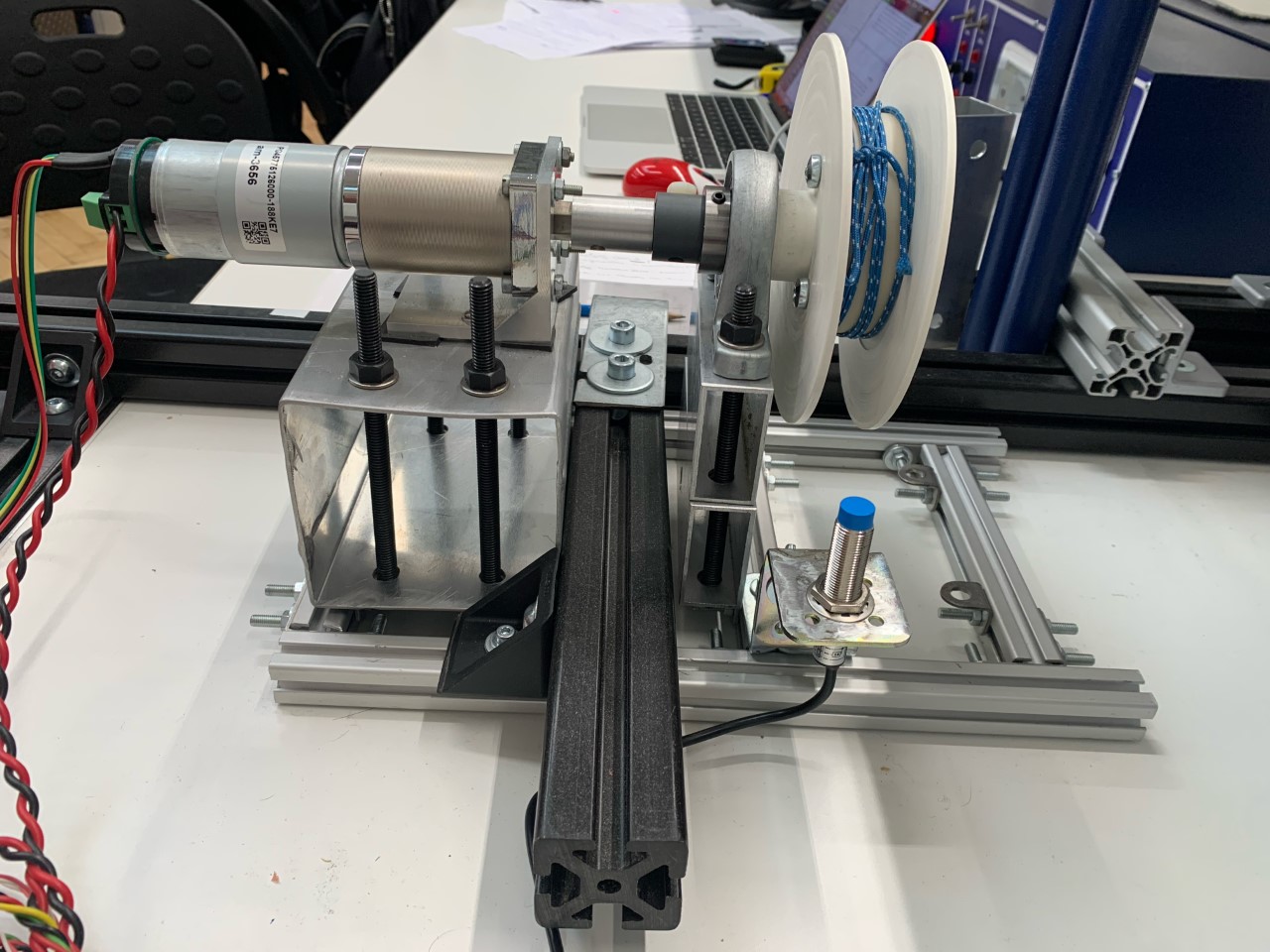
– Un innovativo sistema detto “smart tether system” per l’interazione uomo-robot, dotato di cavo di collegamento con gli utenti.
La progettazione di BUDD-e ha lo scopo di rencdere gli spazi pubblici maggiormente accessibili, portando l’utente a una migliore esperienza degli utenti all’interno di ospedali, centri sportivi, centri commerciali e centri culturali.